
小鹏人形机器人,一碗凉粉秀出两份的量
作者 | 毛心如
一个走猫步的人形机器人成功吸引了全球的目光。
这个机器人就是 11 月 5 日在小鹏科技日亮相的 IRON。
IRON 的亮相堪称戏剧性拉满,小鹏创始人何小鹏面对机器人是真人套衣服的质疑,既无奈又心酸,不得不一次次公开辟谣、展示机器人内部结构以证清白。
而远在大洋彼岸的马斯克不仅在社交平台上公开点赞,并表示 IRON 的造型很不错,未来中国和特斯拉将会主导整个机器人市场。
或许辟谣时心酸的何小鹏,在自证后是乐开了花的,因为他向大众证明了中国制造在现阶段的能力。
何小鹏在自证时感叹,没想到要像《让子弹飞》的情节一般,通过剖开肚子来证明只吃了一碗粉。
然而,正是这一碗粉里,却让人看到了由软硬件技术堆出的两份容量。
 找到拟人化的平衡点
找到拟人化的平衡点
有人说,具身智能的第一个图灵测试,是小鹏机器人 IRON 完成的。工程师得「剖」开机器人,向大家证明这究竟是人还是机器人。
大众抛出怀疑的原因不外乎一点,IRON 太像人了。
从本质上看,拆解机器人,其实是机器+人,把机器做的像人。想实现这个目标有两条常见思路:
通过内部仿生驱动,比如人工肌肉,去还原肌肉的运动学与触感
通过外包柔软的外衣来降低恐怖谷效应,让机器人更「可亲」
这两条路线最典型的实践分别是,荷兰 Clone 研发的 Protoclone 机器人和挪威 1X 研发的 NEO 机器人。

Protoclone 选择用人工肌肉替代电机驱动,实现了仿人机器人上半身 164 个自由度,然而,人工肌肉对材料技术和液压系统技术都有很高的要求,目前其设计还不能完全调教好这两点。
此外,完全以人类肌腱形态进行复刻设计,虽然在拟人化上能做到高度还原,但是恐怖谷效应过大,用户体验感上并不好。
与此形成对比的是,1X 为了体现机器人的安全和亲和力,选择的是外包尼龙等柔软织物,让机器人看起来有柔和感。同时,今年 Figure AI 也在第三代机器人 F.03 采用了外包织物的思路。
而小鹏选择的是将这两条路径进行更有趣的结合。机器人的内里采用电机驱动+弹性体连结的方案,外部用软织物包裹,让机器人实现刚柔并济,既有稳定的躯体,也有柔软触感。
这套方案里,很关键的一个材料就是弹性体,在 IRON 里充当人类筋膜的结构。
这是一种兼具高弹性和轻量化的高性能材料,其特点是受力后能迅速恢复原状,形变可逆性极强。其通过 3D 打印技术构建晶格结构,模拟人类肌肉的收缩、缓冲和动态响应特性。
像优必选 Walker S2 的肘部、智元灵犀 X2 的胳膊、胸甲和腿部以及 Figure 02 的关节处缓震肌肉都有采用到这一材料。
当然,外皮再柔软,真正决定感官上像不像人的,还得看机器人动起来能不能像人。
IRON 的猫步是引发大众怀疑的最大「导火索」。看似简单的步态背后,其实是小鹏对于机械架构的再一次升级。
跟上一代 IRON 相比,这一代在自由度上有了明显增加,从 62 个增加到 82 个,同时新一代 IRON 拥有了仿人脊柱。
在以往人形机器人设计中,躯干往往是刚性设计,这会导致上半身的动作僵硬,重心控制困难。
而仿人脊柱可以让机器人在行走、转向、弯腰时更自然地分配重心,不只是让机器人看起来像人,更能让动作流畅、稳定。
具体来讲,仿生脊柱有 5 个自由度,用到了线性执行器和球头万向节,再结合换成与 Optimus 一样 ARF 串联结构的髋关节,IRON 能在外展、旋转、弯曲等动作都更加自然。
除了躯干设计有了大升级,小鹏在灵巧手上也进行了更新升级,其自由度从 15 个增加到了 22 个,趋近于人手的自由度设计。
此外,小鹏自研了 16mm 的谐波关节,是目前行业最小的谐波关节,以实现灵巧手在性能与尺寸之间的平衡。
IRON 灵巧手大小几乎跟人手趋同,其采用的是目前行业内最成熟的连杆传动方案,在这其中谐波减速器充当关节的肌腱,决定动作是否精确、平滑。
与汽车端业务硬件驱动软件的逻辑相反,机器人遵循的是软件驱动硬件。换句话说,小鹏将 IRON 进行升级,是为了去适配更加聪明的软件大脑。
这一点,海内外的头部玩家像 Figure AI、星动纪元,都遵循的「模型算法-硬件参数」协同开发模式,避免通用模型+通用硬件的适配损耗。
 更类人的智能化系统
更类人的智能化系统
如果说硬件塑造了机器人的躯体,那么软件与智能系统则是赋予其生命的关键。
何小鹏在科技日上表示,新一代 IRON 是首款搭载小鹏第一代物理世界大模型的机器人。
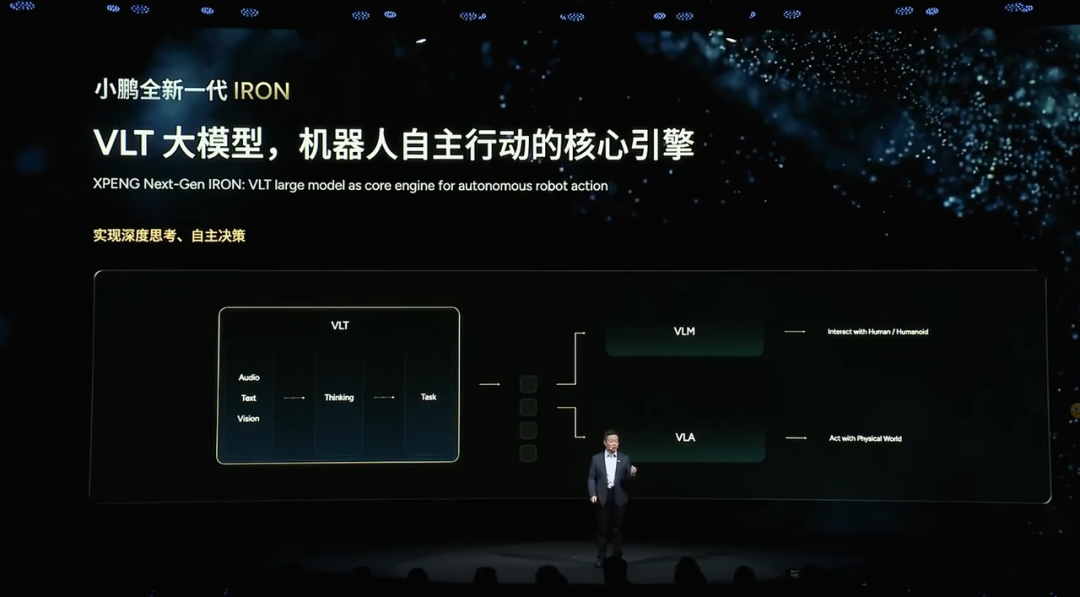
通过构建 VLT(Vision-Language-Task)+VLA+VLM 的高阶能力组合,7 套系统实现了对话、行走和交互三大高阶智能。
拆解这套组合,VLT、VLA、VLM 独立可以自成一套系统,分别对应着大脑、交互和小脑,两两组合可以按任务类型及难度的不同来组合处理,三组模型整合形成系统性的大小脑架构。
其中,VLT 大模型是专为机器人开发的全新大模型,被视为机器人自主行动的核心引擎,使其能够实现深度思考和自主决策。
小鹏的目标是高阶人形机器人,不仅在外观上仿人,在智能化上也想向人脑类同。虽然功能话术对标的是人类大小脑,其实这套架构的实质也是机器人行业里的讲的快慢脑系统。
像 Figure 的 Helix、星动纪元的 ERA-42、星海图的 G0、星尘智能的 DuoCore 等采用的都是快慢脑系统。
这一系统源于快思慢想理论,其指出人类大脑存在两个思维系统,分别是快思考和慢思考,将这一理论引入 VLA 模型设计,目标在解决速度与智能的矛盾。
在 VLA 模型里,快脑通常由一个轻量级的、独立的策略网络担任,负责生成实时的、流畅的动作。慢脑通常由一个庞大的、预训练的 VLM 担任,负责高级的场景理解和任务规划。
尽管双系统显著提升了机器人的执行效率,但将快脑设计成一个全新的、独立于慢脑的模块,使得它无法直接访问和利用慢脑内部海量的预训练知识。
这就会导致快脑像一个只听指令的士兵,而无法理解指令背后的深层含义。
这在某种程度上与人类的思维方式不同,人类的反应往往并非严格分段执行,行动中常夹带理解与习惯性的反思。
为此,小鹏在架构设计上将 VLA 与 VLM 划分得更为清晰,同时加入 VLT 来判别任务的难度,从而为系统提供不同层次的响应速度。
同时,这一次小鹏把车端最新的第二代 VLA 复用在 IRON 上。新一代 VLA 取消了传统 VLA 模型中的语言转译环节,实现视觉信号到动作指令的端到端输出,降低了信息损失并提升响应速度。
具体来说,二代 VLA 选择再次利用来自 V 的信号,让 V 信号和 L 信号共同对决策 A 产生作用,从而既利用了 L 的推理能力,又避免了仅仅将 L 作为决策表征时会产生从 V 到 L 的转译过程中的信息损耗。
这样的架构与特斯拉在 ICCV 2025 上分享的架构非常相似。
特斯拉是用 V 相关的多模态信号一方面产生 L 作为中间表征,另一方面生成全景分割、3D 高斯表征等比原始多模态信号更高维的信号,然后让这类多模态感知信号与 L 的自然语言解释一起,共同决定输出的 Action。
小鹏自动驾驶团队成员也曾表示小鹏的二代 VLA 既是 VLA 模型,也是世界模型,小鹏二代 VLA 在用其 VLA 数据训练世界模型。
特斯拉也在这么做,其将世界模型与智驾模型做了结合,将世界模型预测的下一步世界状态输入给智驾系统,用以对智驾系统进行进一步评估和训练。
作为既造车又造机器人的企业,小鹏与特斯拉在技术路径上有着高度的类同。
不仅体现在车端的智驾系统和自研芯片,也体现在将模型+芯片的技术体系复用到机器人产品中,最大化发挥技术协同优势。
 两大行业难题:灵巧手和应用场景
两大行业难题:灵巧手和应用场景
尽管小鹏这次的机器人在软件和硬件上带来了一定的全新升级,但其仍然面对着人形机器人行业发展的两大难题,一个是灵巧手,一个是人形机器人究竟用在哪里。
虽然新一代 IRON 灵巧手达到了仿人的自由度,同时也打造了更小的减速器关节,但是这只灵巧手在成本和可靠性上仍然存在着大问题。
首先是成本,小鹏机器人一号位米良川表示,目前灵巧手的成本占到了整机成本的 60%,这不仅远超行业 25-35% 的平均水平,距离行业的理想目标 5-10% 更是遥远。

何小鹏也表示一只手的成本远高于雇佣一名工人一年的成本,而且灵巧手放在工厂里 1 个月就坏了,高成本并没有与高可靠性划上等号。
这背后的技术困境在于,高自由度意味着更多电机、减速器与传感器,也意味着更多潜在故障点。
当然这也是目前行业的共性问题,既想追求仿人的高自由度,也想追求成本低,同时又期待产品能够足够耐用。
有许多业内人士表示,很多第三方灵巧手厂商的产品大多寿命在 1-3 个月,有些甚至只有 7 天寿命。
深入来看,机器人灵巧手平均维护周期太短,背后指向的整个行业的痛点:柔性关节、微型谐波、线缆管理与热控制等技术仍然不成熟。
如果说灵巧手是技术硬瓶颈,应用场景就是商业化软难题。
从去年讲机器人进厂打螺丝到今年转向「导览、导购、导巡」的三导场景,小鹏对机器人应用方向的调整反映出产业对现实困境的认知深化。
何小鹏明确表示,经过实践验证,他们发现当前的技术水平下,人形机器人既不适合进入工厂承担重复性的制造任务,也不适合进入家庭处理复杂的家务劳动。
这种坦诚实际上反映了整个行业的难题。
目前来看,人形机器人在市场上的应用仍以娱乐向为主,且多为中小尺寸产品;全尺寸人形机器人在真实环境中的投放占比极低,目前真正在工厂投入使用的,仅有优必选的 Walker S2。
把视野收窄,横向对比广汽、小鹏和特斯拉这三家自研机器人的三家车企:
广汽的 GoMate 原本的投放计划也是在工厂,后来发现不合适,目前应用在了安防、巡检
小鹏的 IRON 原始计划是进工厂,现在变成了三导服务场景
特斯拉目前还没有造出成熟落地的 Optimus 机器人,如果灵巧手问题解决不了,有可能也应用在线下门店
计划应用场景的变更只是难题的第一点,第二点是人形机器人落地的应用价值有多大。
回顾过去,中国的服务机器人早已在导购、导巡等领域应用广泛,如云迹、擎朗等轮式机器人早已铺开。
人形机器人在这些场景中是否有独特价值?目前看,除了更像人带来的互动体验外,并没有形成强竞争壁垒。
以线下门店场景为例,如果只是起到讲解的作用,或许销售会比人形机器人讲得更全面;如果是陪同体验车辆,那对机器人的性能要求更高,例如开车门、坐进车里讲解,需要关节和灵巧手都够灵活。
在博物馆等场景,场景相对比较单一,而且场地空旷,但是完全保证人机安全,同时也要保证人机交互的舒适也是问题。
如果机器人为了避让观众而频繁调整路线,或是让观众主动避让,又或是互动过程中出现卡顿,反而难以达到理想的服务效果。
小鹏 IRON 的亮相如同一面行业镜子,既能照见全球技术新的探索成果,也映照出行业的阶段性困境。
当前全球人形机器人行业处于技术路线收敛、成本快速下降、应用场景拓展的阶段,2025 年更是被视为量产元年,全球将有万台以上的人形机器人量产出货。
在这个关键节点,在技术与量产井喷式爆发的一年,大众的心理阈值一直被拉高,不够吸睛就会丧失流量和关注度。热烈的讨论背后,技术的还不够完美也需要理性看待。
但人形机器人的技术发展从来不是孤立的技术竞赛,而是全球行业协同进化。新一代 IRON 的探索正体现了既借鉴全球先进经验,又结合自身优势本土化创新的路径。
对于所有具身智能玩家而言,其实无需刻意预测行业拐点,更重要的是沉下心做好技术积累,为拐点的到来做好充分准备。
不完美的探索,恰恰是走向拐点的必经之路。
0
分享
好文章,需要你的鼓励










参与评论
请您注册或者登录星河频率社区账号即可发表回复
去登录
相关评论(共0条)
查看更多评论