
绳驱传动,解锁机器人进家庭的新姿势
作者 | 毛心如
2 万美元一次买断,或者每个月花 499 美元订阅,1X 机器人把全球首个家用类人机器人 NEO 正式带入了市场。
不过,这个被寄予厚望的家庭新成员,目前还难以完全独当一面。
在复杂的家庭非结构化环境里,NEO 并不能完成所有家务,更多时候需要用户预约远程专家,由工作人员通过遥操作来完成任务。
然而,1X 开启预售的深层意义在于,通过早期用户体验,获取海量、真实的家庭环境数据,从而反哺其模型性能。
机器人想进入家庭,除了要够聪明外,还需要保证一点,那就是安全,无论是机器人自身的运行安全,还是人机共处时双方的安全。
在这一点,NEO 给出了一种与众不同的解题思路。
从外形看,NEO 浑身穿着毛线衣,从行动步伐来看,能发现它浑身充斥着一种不同于常见的「钢铁侠」机器人的柔软感。
这其中的关键,就在于 NEO 的驱动系统大量应用了腱绳。
在肩膀、手肘、膝盖等关键运动关节,它采用串联弹性驱动器,由高扭矩电机拉动腱绳模拟肌肉收缩,以此替代了传统的齿轮或连杆结构。
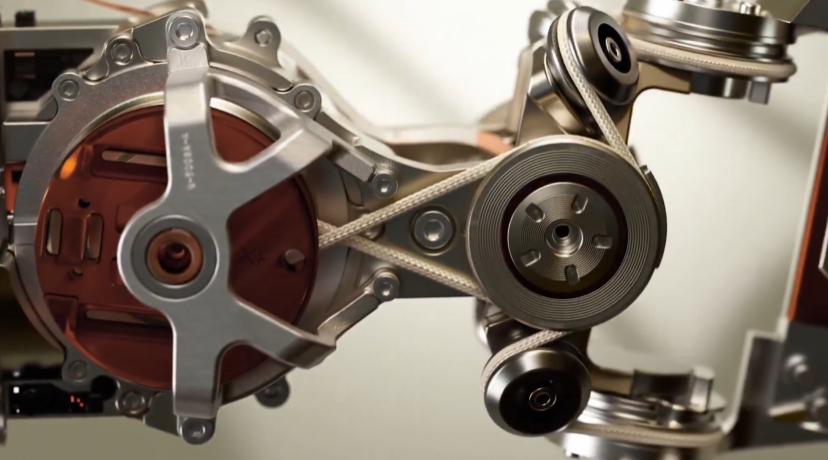
通过全身覆盖仿生的软质腱绳网络,外覆针织尼龙材料,NEO 在实现轻量化与高负载的同时,更从根本上提升了运动的安全性与动作的柔顺性。
按计划,2026 年 1X 将开始量产交付机器人,同时也将成为全球范围内,继星尘智能之后第二家实现绳驱机器人量产的公司。
 腱绳成为机器人进家庭的新选项
腱绳成为机器人进家庭的新选项
腱绳在具身智能行业并不是新物种,在灵巧手领域,早已是多家公司商业化产品的成熟方案。
但在机器人本体上采用腱绳的玩家却凤毛麟角,在 1X 之前,只有韩国 KoreaTech 开发的 LIMS 和中国星尘智能推出的 Astribot S1,前者是实验室产物,后者已开始量产交付。
无论是灵巧手还是机器人本体,采用腱绳驱动的逻辑一脉相承:模仿人体肌腱的仿生设计。打个比方,如果说传统刚性臂构建了机器人的骨骼,那么绳驱臂则是重塑了其经脉。
腱绳与家庭的适配,首先出于最直观的用户需求:家庭场景对机器人的碰撞容忍度要求是最高的。机器人不仅要抗造,动作表现也必须自然、安静,并确保在复杂环境中万无一失。
在这些维度上,腱绳具有天然优势。加之腱绳技术的不断发展,以及相关供应链的日益成熟,其工程化落地的速度正在加快。
家用机器人采用腱绳,主要发挥了三大优势:
第一是低末端惯量带来的动作自然与动态优势。腱绳驱动设计一般会把体积或者重量较大的电机、减速器尽可能放置在手臂或者机器人身体部位,通过高强度缆绳把力传导到关节。
这样一来,关节或者末端执行器的转动惯量会下降,所以在同等功率条件下,机器人能实现更高的瞬态加速度和更短的响应时间,在行为动作时能做到更敏捷,更像人类的自然运动。
第二是被动合规与高回驱性带来的安全感,家庭环境里,机器人与人、宠物发生意外接触几乎不可避免。
相比于刚性传动系统,腱绳的柔性特性使系统在受力时呈现出一定的被动合规,即碰撞能量可以被绳索的弹性、结构的几何分配所吸收,从而降低冲击力峰值。
这就好比同样是不小心撞到桌角,一个是原本的硬邦邦的桌子,一个是边缘用海绵包裹起来的,后者感觉到的疼痛显然比前者小。
这使得绳驱机器人在协作或误触场景中天然更安全,像 1X 也在 NEO 的产品展示中把柔性与被动安作为重要卖点之一。
第三就是传动透明度和感知回馈机制,这直接关系到模型训练数据的质量。绳驱架构便于在绳路处设置力传感器,控制器能获得比传统减速器更直接、更真实的受力信号。
对于模型而言,高质量信号意味着可以花更少的修正性计算去补偿硬件不足带来的误差,同时传动的高透明度也让模型训练时的每一条数据更加「干净」,从而可以提高样本效率和模型的迭代速度。
当然,腱绳驱动并不是万能钥匙。需要厘清的是,绳驱更契合生活化、服务类的轻负载、强交互应用,而在追求极高负载和绝对定点精度的传统工业场景中,其优势并不明显。
工业场景对高负载、效率要求高,还要求机器人能稳定、快速停下,这种工况对腱绳的弹性要求大,并不适合长久使用。
自然,采用绳驱技术也伴随着一系列工程挑战:
绳索具有弹性,不能完全避免慢回弹现象,容易产生误差,需要强悍算法来控制精度
绳索是易耗品,长期使用会自然磨损,需要在选材、制丝以及后期维护全链路关注
绳驱方案区别于以往的刚性驱动方案,需要设计布线路径,来最大化发挥绳驱优势
这些工程挑战并不是无法克服,但需要更多玩家参与到商业化落地的技术验证环节,在实践的过程中找到技术的优化方向。
 星尘智能:绳驱技术量产化的破局者
星尘智能:绳驱技术量产化的破局者
NEO 的推出,给绳驱技术阵营增添了一位强有力的新成员,而国内玩家星尘智能则是将这项技术「拿捏」,成为目前全球首家量产绳驱机器人的公司。
绳驱技术虽好,但是腱绳寿命和形变导致的精度缺失一直是横亘在行业玩家面前的难题,无论是本体厂商还是灵巧手厂商都在寻求工程化最优解。
像特斯拉 Optimus 第三代迟迟推进不下去的拦路虎,就是采用腱绳方案的灵巧手。知情人士表示,Optimus 灵巧手里的腱绳很容易老化继而断裂,最终导致整手的寿命不长。
虽然星尘智能把腱绳的用武之地从精密小巧的灵巧手拓展到轮式机器人本机上,但腱绳的缺陷并不会因为形态的改变而改变。

为此,星尘智能通过「材料选型+算法补偿+创新结构」的组合拳,给出了量产级的解决方案。
星尘智能创始人来杰认为,腱绳的形变问题靠算法解决,蠕变问题则通过材料解决,所以在腱绳选材上,星尘智能避开了超高分子聚乙烯材质,选择用金属材质。
其机器人 Astribot S1 全身大量采用了腱绳,像大臂、小臂、躯干、腰等部位都有覆盖。采用模块化设计,实现「哪里坏了换哪里」。
依托来杰先前在腾讯 Robotics X 实验室的研究经验,以及国内成熟的腱绳供应链体系,Astribot S1 在连续多任务不同工况下,零部件寿命达到了 3.2-6.2 年。
精度控制上,星尘智能采用「预标定+实时补偿」算法。如果没有算法优化,腱绳的弹性形变会导致 3-5 毫米的定位误差,无法满足精细操作需求。
通过自研补偿算法,星尘智能将形变误差控制在了 0.03 毫米,达到工业级别的精度要求。
而在结构层面,星尘智能采用的是创新型的差分并联结构。传统绳驱系统多采用单电机驱动单关节,容易出现动力不足或响应延迟问题。
星尘智能让两个电机协同驱动一个关节,各分担 50% 的负载,不仅让动力性能提升 1 倍,还避免了传统串联电机「一个干活、一个闲置」的能量浪费,进一步提升了动作响应速度。
值得一提的是,「绳驱硬件+补偿算法」形成的核心技术壁垒也被星尘智能认为是其公司护城河。
星尘智能将其绳驱硬件优势总结成三点:
高动态:响应速度快,动作灵活、丝滑
高安全性:机器人具备自我保护系统,可以精准控制与外界交互的力
高力透明度:传动效率>90%,回驱性>80%,运行缓冲柔和,力控分辨率高
从机器人硬件优势来看,星尘智能已经将腱绳驱动的性能做到了阶段性的最优解。除了性能优势外,其实腱绳驱动在成本上也占有一定的优势。
一位业内人士曾表示,目前无论是高分子腱绳还是金属丝腱绳,价格均在每米千元以内,如果市场有足够的需求,其价格可以降到百元内一米。
目前星尘智能的绳驱系统成本,在同等性能下,成本远低于谐波减速器,同时也低于行星减速器。
在同尺寸、同体积条件下,其成本介于行星减速器和谐波减速器之间,但性能表现强于前两者。
今年四季度,星尘智能将开始交付其与仙工智能签署的两年 1000 台机器人订单。除此之外,领益智造也与星尘智能达成合作,未来将在其工业制造与智慧仓储等场景中,规模化部署机器人。
同时,星尘智能也与主营钢帘线的首佳科技合作,进一步优化腱绳寿命与性能,拓宽腱绳应用市场。
 绳驱从「选项」到「主流」的机遇与挑战
绳驱从「选项」到「主流」的机遇与挑战
借用星尘智能创始人来杰的观点,绳驱没成主流,是阶段性问题,以前没有好的平台能把机械、控制、电驱等环节系统地凑在一起研究。
回顾腱绳在灵巧手领域的应用,老牌厂商 Shadow 早已沿用该方案多年,但真正让其「出圈」并引发广泛关注的,却是特斯拉 Optimus 对第三代灵巧手的探索。
虽然目前主流灵巧手产品仍多采用连杆传动方案,但布局并推出腱绳方案商业化产品的玩家正日益增多。
由此看来,绳驱机器人方案从部分玩家的选项走向更广泛的普及与应用,或许只是时间问题。
而腱绳能否真正打开家庭与更大规模的下游市场,得从工程与市场两条线来看,关键在核心技术升级和场景匹配与用户教育这两点。
技术升级方面,要瞄准材料、力传感与算法控制三驾马车。
材料方面,需要开发出兼具高强度、高耐磨、耐腐蚀、耐折弯且轻量化的腱绳产品,这能直接提升机器人的寿命和稳定性,减少维护成本。
目前业内像恒辉安防、南山智尚、首佳科技等上市公司都已开始腱绳开发并积极推进送样测试。
业内人士表示,部分企业已经不满足于金属、高分子等材料方案,正在寻求碳纤维材料方案。由于碳纤维比金属的抗拉强度更高,耐腐蚀性更好,抗疲劳性能更优,目前已有企业与材料厂商在这条赛道上开展合资或项目布局。
其次就是对于力传感的重视与应用程度提升。想让机器人的行为更像人,能进一步融入生活,力的感知和控制是关键因素。
对于绳驱机器人,感知细小的力的变化,需要轻量、低功耗且可校准的传感器,这对提高力的透明度也十分重要。随着传感器成本下降与微电子集成的进步,这类传感器将成为产品标配。
同时这也将利于探索更稳定的力的状态估计和辨识方法来补偿绳的弹性特性。
最后就是要打造更强大的学习型控制与模型闭环。高透明度的绳驱系统能为模型提供更高质量的训练数据,让模型在「本体-数据-算法」的闭环能更快收敛。
针对这一点,星尘智能通过高性能的本体、AI 模型以及高稳定的遥操作,打造了「本体-数据-模型」三位一体的平台正循环。
在应用场景上,腱绳最先撬动的将是那些对速度、柔顺性和交互安全有较高要求,但对极端高精度并非首要的任务,像搬运、整理、家务辅助、陪护辅助等应用,比较契合这一特性。
从技术演化路径来看,腱绳并不会在短期内单方面取代任一驱动形式,但它有可能在人与环境频繁交互的应用领域,成为决定体验和安全的优选本体。
当然,这就会涉及到用户教育这一问题。事实上,凡是跟传动有关系的部位都有可能采用到腱绳,而考虑本机减重也可以采用到腱绳,现在的问题在于尝试的玩家还不够多。
目前大家对腱绳的认知还多数停留在灵巧手,未来更多像星尘智能、1X 这样的绳驱动器人真正在真实场景里跑出样本效应来,腱绳的增量想象空间也绝不会只停留在灵巧手这一细分领域。
在这个全行业都在呼吁并宣传软硬一体化的阶段,软件似乎总是占据着比硬件更耀眼的位置。
但算力是在不断提升的,模型能力也是不断在突破的,只有高性能的本体才能更快,更容易展现出来模型的升级,并反馈给模型优质数据,使其思考得更深,响应得更快,优化得更强。
当我们在思考让一台通用人形机器人走进家庭,与我们朝夕相处时,问题的核心或许已超越了单纯的智慧或安全,而在于我们究竟希望与一个怎样的「存在」共同生活。
是一个力大无穷、精准冰冷,需要我们去小心规避的「钢铁伙伴」,还是一个能够安全地融入我们生活节奏的「家庭成员」?
从深远意义来看,或许绳驱技术给予了机器人多一丝的可被感知。
当人机开始真正意义上和谐相处的时候,它才真正完成了从工具到伙伴的蜕变。
0
分享
好文章,需要你的鼓励










参与评论
请您注册或者登录星河频率社区账号即可发表回复
去登录
相关评论(共0条)
查看更多评论